|
MRAS
Multi Rocket Avionics System
|
|
MRAS
Multi Rocket Avionics System
|
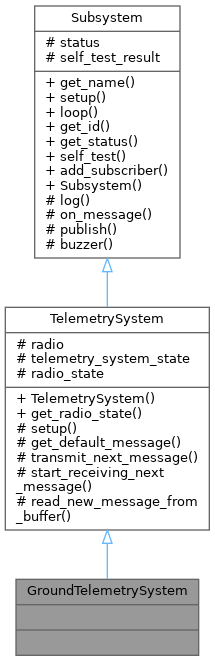
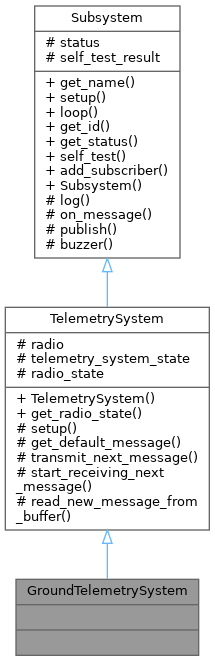
Telemetry system for the ground station. More...
#include <GroundTelemetrySystem.h>
Additional Inherited Members | |
 Public Member Functions inherited from TelemetrySystem Public Member Functions inherited from TelemetrySystem | |
| TelemetrySystem (uint8_t id) | |
| int16_t | get_radio_state () const |
| Public Member Functions inherited from Subsystem | |
| virtual const char * | get_name ()=0 |
| virtual int8_t | setup ()=0 |
| virtual int8_t | loop ()=0 |
| uint8_t | get_id () const |
| int8_t | get_status () const |
| int8_t | self_test () const |
| bool | add_subscriber (Subsystem *subscriber) |
| Subsystem (uint8_t id) | |
| Protected Types inherited from TelemetrySystem | |
| enum | TelemetrySystemState { IDLE , TX , RX } |
| Protected Member Functions inherited from TelemetrySystem | |
| int8_t | setup () override |
| virtual TelemetryMessageQueueMsg * | get_default_message ()=0 |
| void | transmit_next_message () |
| void | start_receiving_next_message (uint32_t timeout=0xFFFFFF) |
| bool | read_new_message_from_buffer (TelemetryMessageReceivedMsg *output, bool receive_again=true) |
| Protected Member Functions inherited from Subsystem | |
| void | log (const char fmt[],...) |
| virtual void | on_message (SystemMessage *msg)=0 |
| void | publish (SystemMessage *msg) |
| Static Protected Member Functions inherited from Subsystem | |
| static void | buzzer (uint16_t frequency, uint32_t duration, bool block=false) |
| Protected Attributes inherited from TelemetrySystem | |
| SX1262 | radio |
| enum TelemetrySystem::TelemetrySystemState | telemetry_system_state = IDLE |
| int16_t | radio_state = 0 |
| Protected Attributes inherited from Subsystem | |
| int8_t | status = 0 |
| int8_t | self_test_result = -1 |
Telemetry system for the ground station.
This class is the variant of the TelemetrySystem that is specific to the ground station
The loop() function is set to enter receive mode first. If a message is received, it will be handled, and the GroundTelemetrySystem Subsystem will emit a ReceivedTelemetryMessageMsg to all of its subscribers.