|
MRAS
Multi Rocket Avionics System
|
|
MRAS
Multi Rocket Avionics System
|
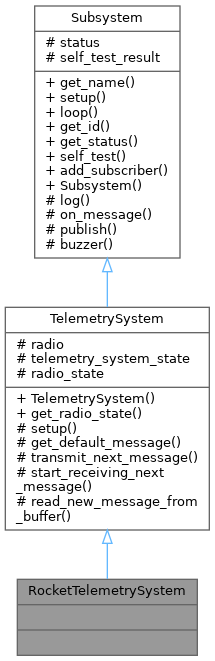
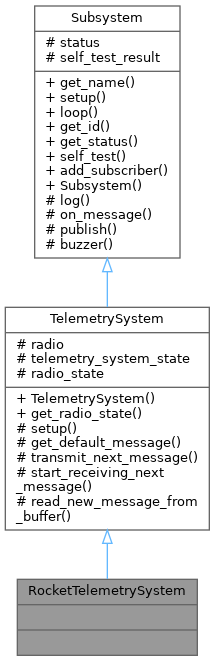
The telemetry system for the rocket. More...
#include <RocketTelemetrySystem.h>
Additional Inherited Members | |
 Public Member Functions inherited from TelemetrySystem Public Member Functions inherited from TelemetrySystem | |
| TelemetrySystem (uint8_t id) | |
| int16_t | get_radio_state () const |
| Public Member Functions inherited from Subsystem | |
| virtual const char * | get_name ()=0 |
| virtual int8_t | setup ()=0 |
| virtual int8_t | loop ()=0 |
| uint8_t | get_id () const |
| int8_t | get_status () const |
| int8_t | self_test () const |
| bool | add_subscriber (Subsystem *subscriber) |
| Subsystem (uint8_t id) | |
| Protected Types inherited from TelemetrySystem | |
| enum | TelemetrySystemState { IDLE , TX , RX } |
| Protected Member Functions inherited from TelemetrySystem | |
| int8_t | setup () override |
| virtual TelemetryMessageQueueMsg * | get_default_message ()=0 |
| void | transmit_next_message () |
| void | start_receiving_next_message (uint32_t timeout=0xFFFFFF) |
| bool | read_new_message_from_buffer (TelemetryMessageReceivedMsg *output, bool receive_again=true) |
| Protected Member Functions inherited from Subsystem | |
| void | log (const char fmt[],...) |
| virtual void | on_message (SystemMessage *msg)=0 |
| void | publish (SystemMessage *msg) |
| Static Protected Member Functions inherited from Subsystem | |
| static void | buzzer (uint16_t frequency, uint32_t duration, bool block=false) |
| Protected Attributes inherited from TelemetrySystem | |
| SX1262 | radio |
| enum TelemetrySystem::TelemetrySystemState | telemetry_system_state = IDLE |
| int16_t | radio_state = 0 |
| Protected Attributes inherited from Subsystem | |
| int8_t | status = 0 |
| int8_t | self_test_result = -1 |
The telemetry system for the rocket.
This class is a variant of the TelemetrySystem that is specific to the rocket
The loop() function is set to enter transmit mode first. If a message is received, it will be handled, and the RocketTelemetrySystem Subsystem will emit a ReceivedTelemetryMessageMsg to all of its subscribers.