|
MRAS
Multi Rocket Avionics System
|
|
MRAS
Multi Rocket Avionics System
|
As our hardware designs evolve, different sensors and processors will be used, and the software must be written in such a way that these components can be swapped with no issues. In past iterations of the MRAS software, this was achieved with an inheritance based model for different sensors. Each sensor inherited from a standard Sensor class, and a further abstraction layer was used for different types of sensors, such as Barometer, Accelerometer, and so on.
However, after a while it was apparent that this approach does not scale well to other applications. There are more than just Sensors on MRAS, and all of these subsystems need to be managed.
During some initial software design meetings, a message-based system was proposed. Initially this was viewed as overcomplicated and involving too much overhead, however after discovering the issues described above, the team decided to review the software architecture plan.
We decided to split the software up into Subsystems. These Subsystems can communicate with each other by sending each other messages, which we refer to as SystemMessages. All of these Subsystems are managed by one singleton class called MRAS_System. This class manages the setup, status, and state of all the subsystems during the execution of the program.
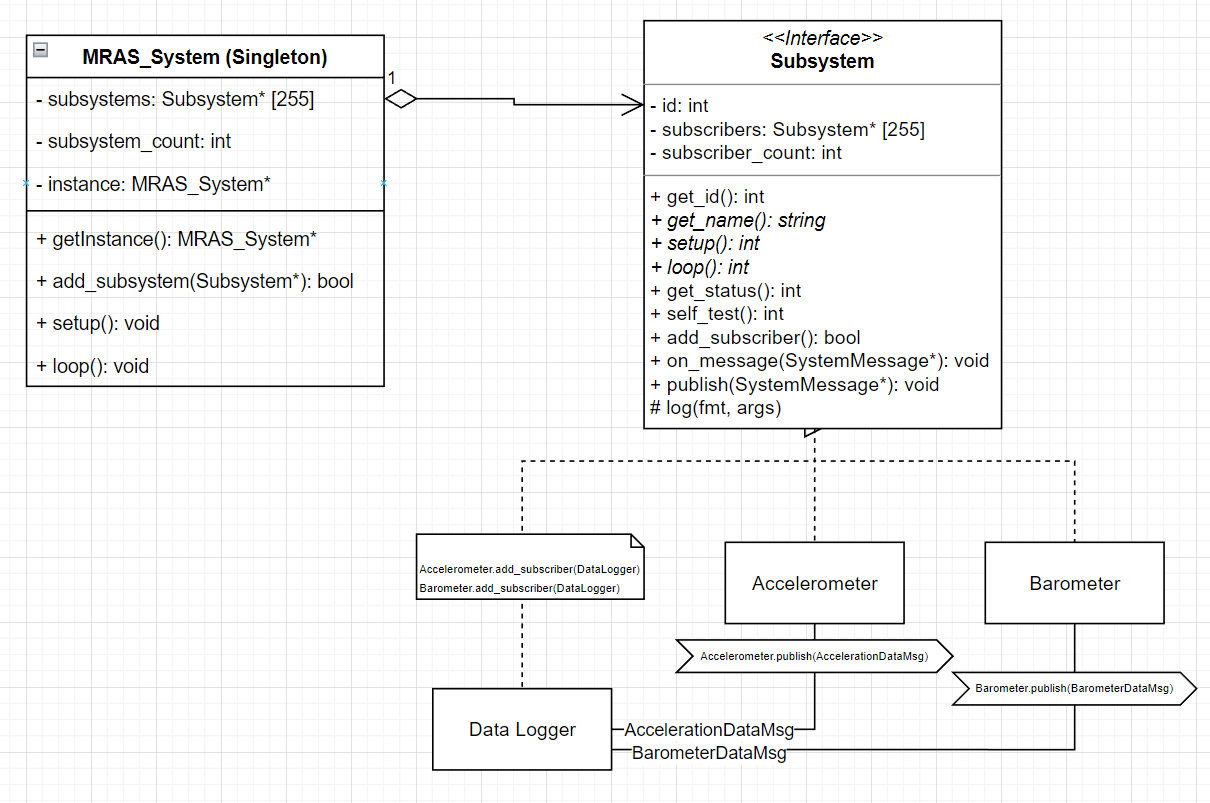
Shown above are three example subsystems, Accelerometer, Barometer, and DataLogger. The DataLogger is subscribed to the Accelerometer and Barometer, allowing it to receive AccelerometerDataMsg and BarometerDataMsg messages.
The Subsystem model works quite well with the Arduino software framework. Each Subsystem has a setup() and loop() function, which mirrors that of Arduino. Therefore, MRAS can be considered to be made up of loads of small Arduino programs. This makes it easier to scale the software.
It is worth noting here that we only have one thread available. MRAS is currently single-threaded. Therefore, the
loop()function within each Subsystem must be designed to return almost immediately. No blocking calls to functions such asdelay()are allowed. Each Subsystem should be thoroughly tested to make sure it is not blocking the operaton of other Subsystems.
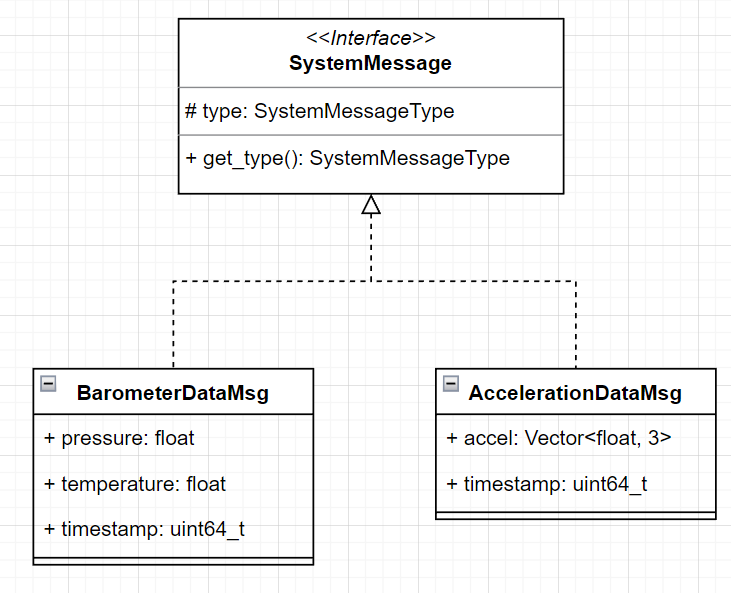
System Messages can be implemented as shown above. They inherit from the SystemMessage base class. A new SystemMessageType must be added to the SystemMessageType enum, corresponding to the name of the new system message. Shown here:
A pointer to the MRAS_System class (accessible globally) can be attained as follows:
Each Subsystem needs to be registered with MRAS. This is done as follows:
In the main Arduino program, the setup() and loop() functions of MRAS_System need to be called. This allows MRAS to run the setup() and loop() functions for each Subsystem.
For this section we will use an example of a Magnetometer. Specifically, Sensor_LIS3MDL.
Start by creating an instance of a new MagnetometerDataMsg:
Now set any fields within the SystemMessage to their desired values (in this case, set the Magnetometer vector to a new reading from the sensor)
Then publish the SystemMessage to all subscribed subsystems using the publish() function.
Each Subsystem can override a message handler as shown:
If the Subsystem does not need to receive messages, a Macro can be used to skip creating this handler:
Within this message handler, a switch statement can be used to receive different types of system messages. Shown below is an example of receiving a MagnetometerDataMsg: